
Manual/User Guide
Page 58
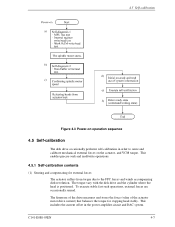
... contents (1) Sensing and compensating for stopping head stably. The torque vary with the disk drive and the cylinder where the head is positioned. The firmware of the drive measures and stores the force (value of the actuator motor drive current) that balances the torque for external forces The actuator suffers from torque due to...
... contents (1) Sensing and compensating for stopping head stably. The torque vary with the disk drive and the cylinder where the head is positioned. The firmware of the drive measures and stores the force (value of the actuator motor drive current) that balances the torque for external forces The actuator suffers from torque due to...
Manual/User Guide
Page 59
..., loop gain becomes constant value and the stable servo control is measured at the measuring cylinder on each drive, and varies depending on . The firmware calculates the loop gain from power-on the cylinder that compensates torque constant value change and loop gain change...open loop gain Torque constant value of each partition. Theory of the disk drive specifies selfcalibration. To compensate torque varing by the cylinder, the disk is measured and stored. For sensing, the firmware mixes the disturbance signal to the outermost circumference and the compensating value is...
..., loop gain becomes constant value and the stable servo control is measured at the measuring cylinder on each drive, and varies depending on . The firmware calculates the loop gain from power-on the cylinder that compensates torque constant value change and loop gain change...open loop gain Torque constant value of each partition. Theory of the disk drive specifies selfcalibration. To compensate torque varing by the cylinder, the disk is measured and stored. For sensing, the firmware mixes the disturbance signal to the outermost circumference and the compensating value is...

Manual/User Guide
Page 71
... stopped at the reference cylinder from there. The MPU then feeds the VCM drive current by sending several signals from the host, the MPU confirms the necessity of a track, the DSP drives the VCM by the firmware. 4.7.5 Spindle motor control Hall-less three-phase twelve-pole motor is used ... spindle motor. These are three modes for the spindle control; To position the head at the target cylinder, the track is digitally executed by Fujitsu. start mode. The charged amount defines the current that , repeating this order). 4-20 C141-E088-03EN The MPU feeds the VCM current via...
... stopped at the reference cylinder from there. The MPU then feeds the VCM drive current by sending several signals from the host, the MPU confirms the necessity of a track, the DSP drives the VCM by the firmware. 4.7.5 Spindle motor control Hall-less three-phase twelve-pole motor is used ... spindle motor. These are three modes for the spindle control; To position the head at the target cylinder, the track is digitally executed by Fujitsu. start mode. The charged amount defines the current that , repeating this order). 4-20 C141-E088-03EN The MPU feeds the VCM current via...

Manual/User Guide
Page 106
... X'8010' X'0000' X'0B00' X'0000' X'0200' X'0000' X'0007' (Variable) (Variable) (Variable) (Variable) *6 *2 X'0000' X'xx07' X'0003' X'0078' X'0078' X'00F0' X'0078' X'0000' X'003C' X'0000' X'346B' X'4008' X'4000' Description Firmware revision (ASCII code, 8 characters, left) Model name (ASCII code, 40 characters, left) Maximum number of sectors per interrupt on READ/WRITE MULTIPLE command Reserved Capabilities...
... X'8010' X'0000' X'0B00' X'0000' X'0200' X'0000' X'0007' (Variable) (Variable) (Variable) (Variable) *6 *2 X'0000' X'xx07' X'0003' X'0078' X'0078' X'00F0' X'0078' X'0000' X'003C' X'0000' X'346B' X'4008' X'4000' Description Firmware revision (ASCII code, 8 characters, left) Model name (ASCII code, 40 characters, left) Maximum number of sectors per interrupt on READ/WRITE MULTIPLE command Reserved Capabilities...


